Witam
Mój projekcik nabiera rozpędu, więc pomyślałem, że się pochwalę, oraz ew. dam pole do sugestii i uwag ze strony szanownych forumowiczów.
Jak wspominałem w powitalni, majstruję quadro, które głównym komputerem ma być... zwykły smartfon. Założenie jest takie, że w większości smartfonów cała potrzebna elektronika już jest (akcelerometry, żyroskopy, GPSy etc.) plus jest wygodne do programowania środowisko, plus cała gama zabawek związanych z łącznością itd. Wg mnie to szalenie interesująca perspektywa.
Jestem na etapie majstrowania drona i przygotowywania całego zestawu do lotu. Na dzień dobry maszyneria:
- rama S500-PCB (
http://abc-rc.pl/Quadcopter-S500-PCB)
- silniki emax MT2213 (935KV)
- śmigła GF 10x4,5 (nylon+carbon)
- Esc Emax SimonK 20A
- akumulatorek 3s 2200 mAh (jakiś niedrogi)
(Wrzucam tylko jedno zdjęcia, bo każdy z Was wie mniej więcej jak wygląda poskładany dron, a i ja nie stosuję żadnych specjalnych myków konstrukcyjnych

)

Co do elektroniki to tu zaczyna się kombinowanie. Generalnie mój chytry plan jest taki, żeby stowrzyć następujący łańcuch:
"urządzenie sterujące" --->
(jakaś forma łączności radiowej) --->
"kontroler lotu" --->
(bluetooth) --->
"sterownik silników"Komentarz do kolejnych elementów:
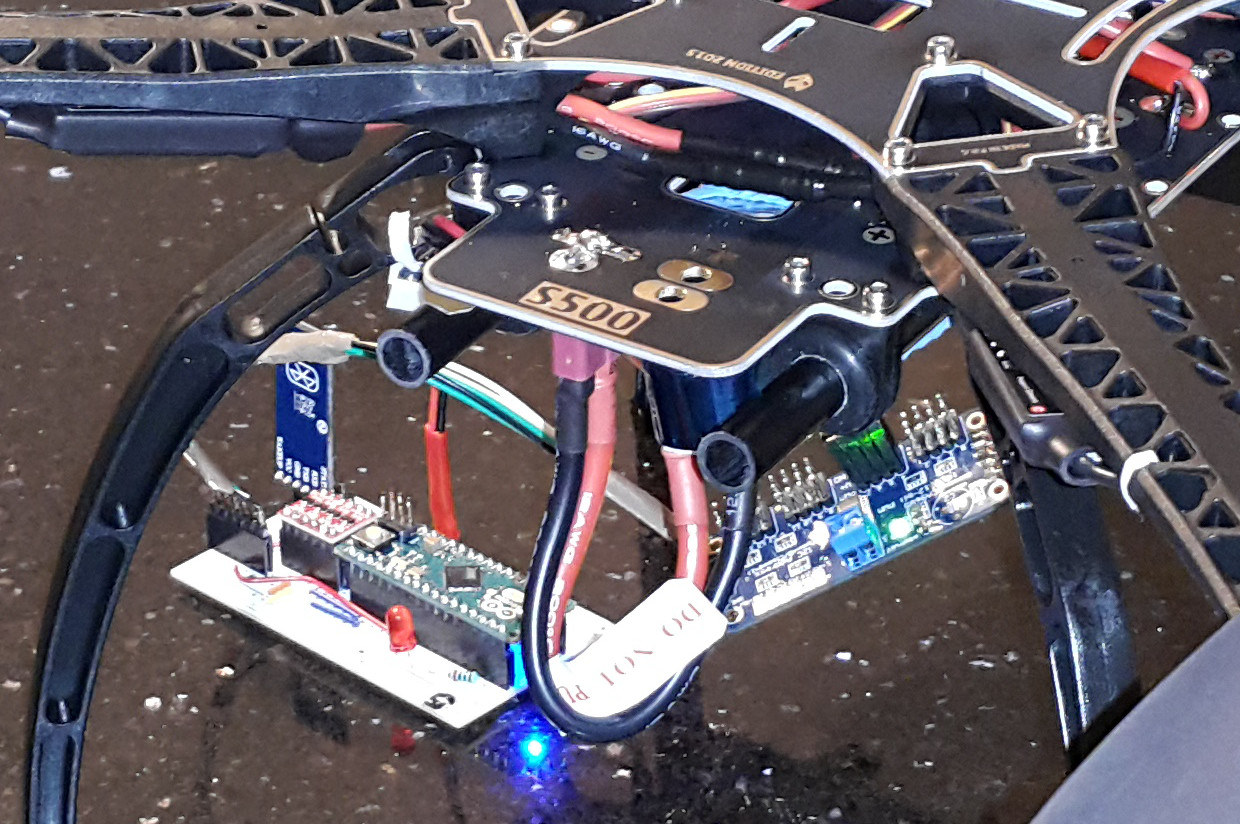
- sterownik silników to zbiorowisko mikroukładów (używam arduino), które mają zapewnić mi możliwość wysterowania ze smartfona silników. Ja używam Arduino Micro + sterownik PWM Adafruit + HC-05 do łączności BT (padło na Bluetooth bo jest tanio i łatwo). Ten zestaw nie zawiera żadnej logiki (no może poza prostą procedurą awaryjnego lądowania, gdyby padł smartfon kontrolujący lot - ale to i tak nie zadziała za specjalnie, bo te płytki nie mają żadnych sensorów stabilizujących

), ma za zadanie tylko wystawić po bluetooth API dla smartfona do sterowania silnikami.
- kontroler lotu to rzeczony smartfon. Będzie posiadał soft, który na podstawie wskazań czujników będzie miał za zadanie utrzymać drona w powietrzu. Ma być na stałe przytwierdzony do drona.
- urządzenie sterujące to dodatkowy element, który dla odmiany do drona przytwierdzony nie będzie. Planuję trzymać go w łapach i sterować z niego lotem (i ew. modyfikować parametry pracy kontrolera lotu). Swoista aparatura sterująca, w praktyce pewnie tablet z dodatkowym softem. Do łączności chyba znowu na początke pójdę w bluetooth - kilkanaście metrów zasięgu powinno starczyć do pierwszych testów. Potem będę kombinował, może po WiFi albo LTE - ciekawe jak będzie z opóźnieniami.
Tutaj mam zdjątko układzików podczepionych już pod drona (sorry za jakość):
Na pierwszy ogień jako kontroler lotu planuję wykorzystać smartfona LG L9 (staroć, więc nie będzie mi szkoda jakby co
). Z pożytecznych rzeczy ma na pokładzie akcelerometr. Może mi trochę brakować żyroskopu, ale moim najbliższym celem jest osiągnięcie stabilnego zwisu, myślę że akcelerometr do tego w zupełności wystarczy. Jak pomysł wypali, to poszukam smartfona z kompletem sensorów i będę kontynuował.
Aktualny etap prac jest następujący:
- latadło poskładane
- soft do adaptera PWM napisany i działa
- soft do smartfona sterującego w produkcji
- soft to urządzenia robiącego za aparaturę - w planach

To tyle, chętnie wysłucham uwag i komentarzy, jak i propozycji na co zwrócić uwagę lub z czym mogę mieć problemy
PS. Taka wątpliwość mnie naszła - każdy z tych ESC ma zintegrowanego BEC'a. Wpiąłem to wszystko w sterownik PWM i jakoś działa, ale mam zawsze wątpliwości czy dobrze robię, jak łączę V+ z kilku niezależnych źródeł (a tak wyszło, bo wszystkie V+ na płytce z wyjściami PWM są zmostkowane). Czy ESCom nie będzie przeszkadzało takie połączenie? W sumie to by mi było bardzo na rękę, bo mając takie 4 BECe spięte razem, nagle mi się robi na łączu V+ dostępne 5V/8A, czyli jakby mi w przyszłości odbiło żeby tam coś jeszcze podłączać to jest spore pole do popisu. Tylko... właśnie, czy takie spinanie BECów jest OK (pytanie noobowskie, ale wolę się tego nie nauczyć poprzez konieczność zakupu nowych ESC)?







