Oto aktualne parametry i wygląd mego quada. Piszę aktualne gdyż ten kopterek jest rozwijany od BARDZO wielu lat. Przez te wszystkie lata miał:
- 4 różne płytki sterujące
- 2 zestawy silników
- 3 zestawy regulatorów
- 2 ramy
- posiadał lub nie FPV (2.4GHz i 1.2GHz)
- ze 3 systemy linku RC w tym 35MHz

itd...

Ot taka niekończąca się opowieść.
Parę zdjęć da większy obraz:
Załącznik:
 IMG_0715s.jpg [ 387.66 KiB | Przeglądane 5218 razy ]
IMG_0715s.jpg [ 387.66 KiB | Przeglądane 5218 razy ]
Załącznik:
 IMG_0713s.jpg [ 357.13 KiB | Przeglądane 5218 razy ]
IMG_0713s.jpg [ 357.13 KiB | Przeglądane 5218 razy ]
Załącznik:
 IMG_0714s.jpg [ 255.6 KiB | Przeglądane 5218 razy ]
IMG_0714s.jpg [ 255.6 KiB | Przeglądane 5218 razy ]
Załącznik:
 IMG_0716s.jpg [ 356.92 KiB | Przeglądane 5218 razy ]
IMG_0716s.jpg [ 356.92 KiB | Przeglądane 5218 razy ]
Załącznik:
 IMG_0717s.jpg [ 229.34 KiB | Przeglądane 5218 razy ]
IMG_0717s.jpg [ 229.34 KiB | Przeglądane 5218 razy ]
Załącznik:
 IMG_0719s.jpg [ 385.1 KiB | Przeglądane 5218 razy ]
IMG_0719s.jpg [ 385.1 KiB | Przeglądane 5218 razy ]
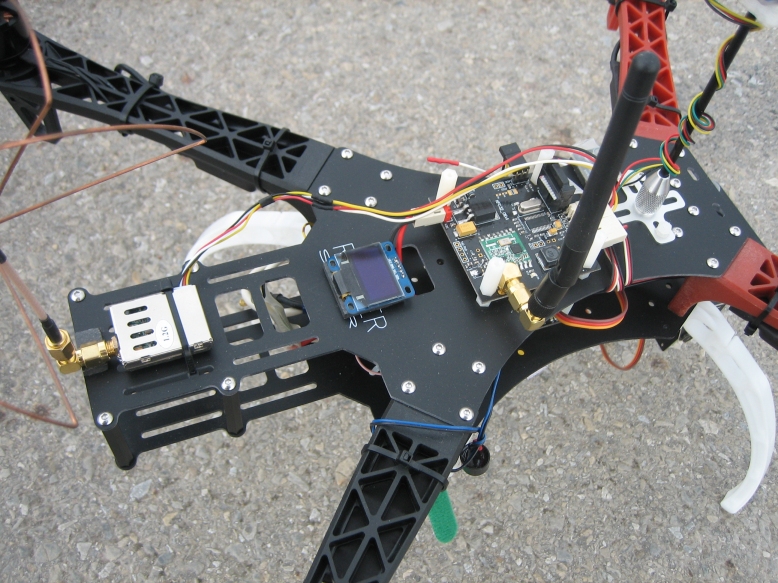
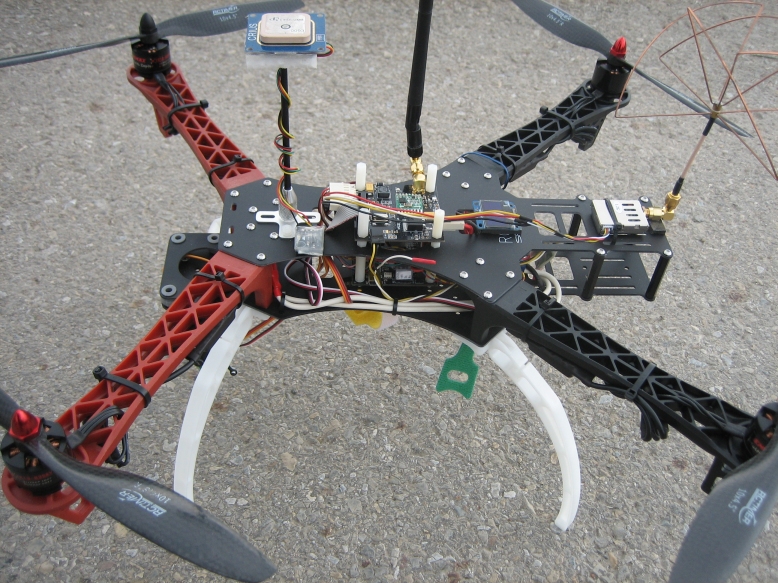
Czyli aktualnie mamy:
- FC KFC32
- OSD + eLeReS również od Marbalona
- gps z ebaya, czujnik prądu Pitlab, magnetometr od Marbalona
- silniki
emax2213-935kV- łopaty węglowe 10x4.5 z Rctimer
- bipczyk ze sklepu elektronicznego
- regle
30A Opto z firmware Simonk- rama
Spider- kamera płytkowa + gimball z HK zawieszone na 2 serwach 9gram
- link video 1.2Ghz 200mW - antena nadawcza koniczynka lub bacik (złączka kątowa i filtr)
- wyświetlacz oled I2C z ebaya
To wszystko daje 1039 gram bez baterii. Bateria to 3s 2650mAh, czasem więcej niż jedna.





