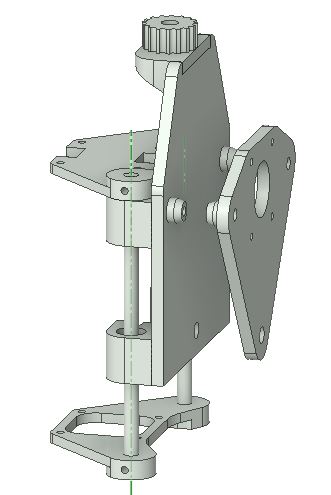
Dzięki uprzejmości Pawła z Pabianic stałem się właścicielem laserka 30W 450nm. Po szybkim spojrzeniu na zawartość kartonów okazało się, że jedynymi elementami jakich mi brakuje jest kilka rolek do profili 2020, oraz pasek GT2. Czekając na ich dotarcie z dalekich Chin postanowiłem trochę porysować w DSMie, i wydrukować poszczególne elementy. Rama jest z profili 2020 o długości 130cm i 60cm, co mi dało pole robocze 113,5x47,5cm. Jak uporządkuję pokój zapodam fotki całości, a teraz tylko rzuty poszczególnych elementów wraz z ich STLami. Kilka elementów musiało być sklejanych (oprawki łożysk liniowych do płytki karetki, oraz podstawka pod śrubę regulacyjną wysokości). Każdy element jezdny składa się z 3 rolek - 2 na górze mocowane na sztywno, 1 na dole regulowana dwoma mimośrodami. Pierwotnie był to jeden mimośród i tulejka dystansowa, ale że mimośrodów mam jeszcze chyba z 10 więc dałem po jednym na stronę - kolosalnie poprawiło to sztywność regulacji, choć jedynym minusem jest konieczność pilnowania by obydwa mimośrody miały jednakowe wychylenie.
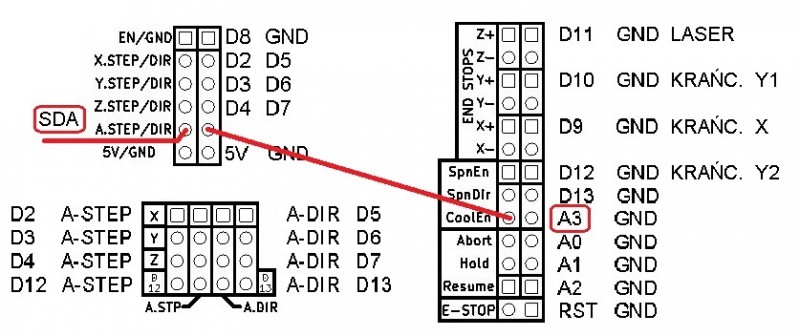
Elektronika to Arduino UNO plus nakładka, zaś napęd - 3 silniki NEMA17,rolki napędowe 16 zębów. Wiem że większość używa jednego silnika na obie strony osi Y (plus wałek przenoszący napęd), ja jednak zdecydowałem się na 2 silniki by mieć możliwość jak najdokładniejszego dotarcia do punktów zerowych. Silniki działają w ten sposób że podczas pracy obydwa chodzą równocześnie, jednak bazowanie jest niezależne. Kanapka CNC na arduino wymagała małej modyfikacji kabelkologii po to, by oś która w oryginale była klonowana mogła działać niezależnie od oryginalnej osi Y - i otrzymałem dwa niezależne sterowania dwoma silnikami. Jeśli lud czytający te wypociny sobie zażyczy - zrobię malunek gdzie trzeba zrobić połączenie dwoma przewodami (na szczęście do już wyprowadzonych oryginalnych pinów), i zapodam zmodyfikowanego configa do wgrania w arduino.
Elementy z fotek 3, 10, 11 i 12 mają wtopione inserty M3, zaś elementy 6 i 13 mają otwory pod górne rolki gwintowane w wydruku.
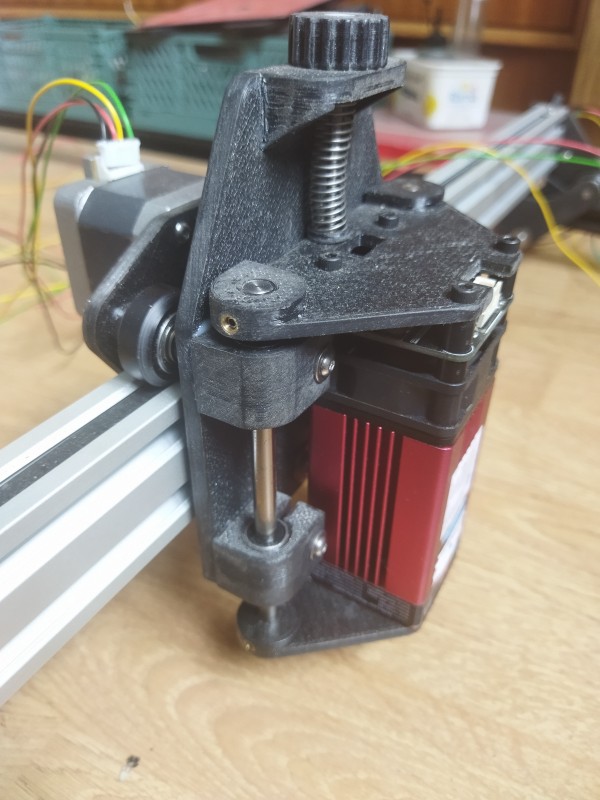
Póki co jestem po pierwszych testach samego działania całości, i na chwilę obecną czeka mnie jedynie jakieś logiczne rozłożenie przewodów - no i coś czego aż się boję na samą myśl o tym, czyli naumienie się obsługi programu

Załącznik:
 00.JPG [ 53.42 KiB | Przeglądane 2238 razy ]
00.JPG [ 53.42 KiB | Przeglądane 2238 razy ]
Załącznik:
 01.JPG [ 21.22 KiB | Przeglądane 2238 razy ]
01.JPG [ 21.22 KiB | Przeglądane 2238 razy ]
Załącznik:
 01.stl [274.4 KiB]
Pobrane 38 razy
01.stl [274.4 KiB]
Pobrane 38 razy
Załącznik:
 02.JPG [ 13 KiB | Przeglądane 2238 razy ]
02.JPG [ 13 KiB | Przeglądane 2238 razy ]
Załącznik:
02.stl [125.18 KiB]
Pobrane 30 razy
Załącznik:
 03.JPG [ 18.4 KiB | Przeglądane 2238 razy ]
03.JPG [ 18.4 KiB | Przeglądane 2238 razy ]
Załącznik:
03.stl [113.66 KiB]
Pobrane 30 razy
Załącznik:
 04.JPG [ 16.96 KiB | Przeglądane 2238 razy ]
04.JPG [ 16.96 KiB | Przeglądane 2238 razy ]
Załącznik:
04.stl [94.42 KiB]
Pobrane 38 razy
Załącznik:
 05.JPG [ 17.88 KiB | Przeglądane 2238 razy ]
05.JPG [ 17.88 KiB | Przeglądane 2238 razy ]
Załącznik:
05.stl [82.7 KiB]
Pobrane 32 razy
Załącznik:
 06.JPG [ 15.65 KiB | Przeglądane 2238 razy ]
06.JPG [ 15.65 KiB | Przeglądane 2238 razy ]
Załącznik:
06.stl [117.17 KiB]
Pobrane 32 razy
Załącznik:
 07.JPG [ 12.17 KiB | Przeglądane 2238 razy ]
07.JPG [ 12.17 KiB | Przeglądane 2238 razy ]
Załącznik:
07.stl [28.6 KiB]
Pobrane 31 razy
Załącznik:
 08.JPG [ 11.18 KiB | Przeglądane 2238 razy ]
08.JPG [ 11.18 KiB | Przeglądane 2238 razy ]
Załącznik:
08.stl [178.21 KiB]
Pobrane 29 razy
Załącznik:
 09.JPG [ 23.06 KiB | Przeglądane 2238 razy ]
09.JPG [ 23.06 KiB | Przeglądane 2238 razy ]
Załącznik:
09.stl [223.81 KiB]
Pobrane 33 razy
Załącznik:
 10.JPG [ 20.75 KiB | Przeglądane 2238 razy ]
10.JPG [ 20.75 KiB | Przeglądane 2238 razy ]
Załącznik:
10.stl [284.26 KiB]
Pobrane 29 razy
Załącznik:
 11.JPG [ 17.99 KiB | Przeglądane 2238 razy ]
11.JPG [ 17.99 KiB | Przeglądane 2238 razy ]
Załącznik:
11.stl [282.6 KiB]
Pobrane 37 razy
Załącznik:
 12.JPG [ 15.61 KiB | Przeglądane 2238 razy ]
12.JPG [ 15.61 KiB | Przeglądane 2238 razy ]
Załącznik:
12.stl [58.09 KiB]
Pobrane 33 razy
Załącznik:
 12a.JPG [ 27.96 KiB | Przeglądane 2238 razy ]
12a.JPG [ 27.96 KiB | Przeglądane 2238 razy ]
Załącznik:
 12b.JPG [ 25.18 KiB | Przeglądane 2238 razy ]
12b.JPG [ 25.18 KiB | Przeglądane 2238 razy ]
Załącznik:
 13.JPG [ 19.88 KiB | Przeglądane 2238 razy ]
13.JPG [ 19.88 KiB | Przeglądane 2238 razy ]
Załącznik:
13.stl [257.5 KiB]
Pobrane 29 razy
Załącznik:
 14.JPG [ 17.27 KiB | Przeglądane 2238 razy ]
14.JPG [ 17.27 KiB | Przeglądane 2238 razy ]
Załącznik:
14.stl [133.97 KiB]
Pobrane 30 razy
EDIT 1Dorzucam projekt wykonany w DSMie:
Załącznik:
 _ LASER.rar [1.48 MiB]
Pobrane 32 razy
_ LASER.rar [1.48 MiB]
Pobrane 32 razy
oraz podłączenie drugiego silnika Y i kilka fotek samej maszyny:
Załącznik:
 CNC shield.jpg [ 109.64 KiB | Przeglądane 2203 razy ]
CNC shield.jpg [ 109.64 KiB | Przeglądane 2203 razy ]
Załącznik:
 01.jpg [ 3.8 MiB | Przeglądane 2203 razy ]
01.jpg [ 3.8 MiB | Przeglądane 2203 razy ]
Załącznik:
 02.jpg [ 3.67 MiB | Przeglądane 2203 razy ]
02.jpg [ 3.67 MiB | Przeglądane 2203 razy ]
Załącznik:
 03.jpg [ 3.88 MiB | Przeglądane 2203 razy ]
03.jpg [ 3.88 MiB | Przeglądane 2203 razy ]
Załącznik:
 04.jpg [ 3.47 MiB | Przeglądane 2203 razy ]
04.jpg [ 3.47 MiB | Przeglądane 2203 razy ]
Załącznik:
 05.jpg [ 3.22 MiB | Przeglądane 2203 razy ]
05.jpg [ 3.22 MiB | Przeglądane 2203 razy ]
Załącznik:
 06.jpg [ 3.36 MiB | Przeglądane 2203 razy ]
06.jpg [ 3.36 MiB | Przeglądane 2203 razy ]
Załącznik:
 07.jpg [ 5.54 MiB | Przeglądane 2203 razy ]
07.jpg [ 5.54 MiB | Przeglądane 2203 razy ]
Załącznik:
 08.jpg [ 3.71 MiB | Przeglądane 2203 razy ]
08.jpg [ 3.71 MiB | Przeglądane 2203 razy ]
Załącznik:
 09.jpg [ 3.78 MiB | Przeglądane 2203 razy ]
09.jpg [ 3.78 MiB | Przeglądane 2203 razy ]
Załącznik:
 10.jpg [ 3.92 MiB | Przeglądane 2203 razy ]
10.jpg [ 3.92 MiB | Przeglądane 2203 razy ]
EDIT 2I na koniec - ustawienia softu Arduino i GRBL. Sam soft został zassany z
TEJ stronki, spod wytłuszczonego słowa "firmware". Okazało się jednak, że ta wersja nie do końca odpowiada moim wymaganiom, a ponadto posiada jeden błąd w literówce któregoś z plików tworzących cały wsad do Arduino. Moje wymagania dotyczyły dwóch silników na osi Y, zaś literówka była w którymś z plików innym niż config - błąd uwidaczniał się chyba w momencie zaznaczenia że oś Y składa się z dwóch silników. Teraz nie zapodam dokładnego linku, ale gdzieś na wiki GRBLa było to dokładnie opisane.
Tak czy siak - poniżej wsad jaki wgrałem u siebie, i oczywiście z poprawioną literówką.
Załącznik:
_ Laser.rar [293.06 KiB]
Pobrane 41 razy
Sam program LaserGRBL również wymagał odpowiednich ustawień, i szczerze mówiąc spędziłem @!!!!!@ godzin na rozwiązaniu problemów z krańcówkami - całość nie działała jak chciałem. Lekarstwem okazały się ustawienia "dolarów" jak poniżej - mimo iż mam w sumie 3 krańcówki, to któraś z opcji LaserGRBL wymaga zaznaczenia ich braku ($21??)

..
Tak czy siak - teraz wszystko działa jak chciałem, i niniejszym pragnę się tą radością podzielić
Kod:
$0=10
$1=25
$2=0
$3=1
$4=0
$5=0
$6=0
$10=1
$11=0.010
$12=0.002
$13=0
$20=1
$21=0
$22=1
$23=3
$24=25.000
$25=2000.000
$26=250
$27=1.000
$30=1000
$31=0
$32=1
$100=48.240
$101=48.240
$102=48.240
$110=2000.000
$111=2000.000
$112=500.000
$120=10.000
$121=10.000
$122=10.000
$130=475.000
$131=1135.000
$132=200.000









