Słuchajcie Romana, ma w pracy codziennie kontakt z krokówkami. Silnik krokowy nie jest dobrym rozwiązaniem.
Linkowany robot waży 125kg. To już nam mówi, że siła działająca "pionowo" na jedno koło to 31,25kg Przeglądając dalej opis na stronie można się dowiedzieć, że użyty napęd to "hydrostatic drive system"
Mały opis z sieci:
"Napędy hydrostatyczne są powszechnie uznawane za doskonały sposób przenoszenia mocy, gdy wymagana jest regulacja prędkości wyjściowej. Zazwyczaj mają lepsze parametry od napędów tradycyjnych o zmiennej prędkości (przekładnie zębate czy kołowe typu mechanicznego i elektrycznego), oferują szybką reakcję, utrzymują dokładną prędkość przy różnych obciążeniach i umożliwiają bezstopniową regulację prędkości od zera do maksimum."
Używane są w wózkach golfowych, kosiarkach i wszystkich małych urządzeniach gdzie mamy do dyspozycji tylko niewielki silnik.
No i jak wygląda:
Kosiarka ma wysokość 60cm co powoduje że środek ciężkości jest nisko umiejscowiony - dodatkowy plus przydatny przy koszeniu i podjazdach.
Poszczególne części można oglądnąć w katalogu części zamiennych. Polecam dla przykładu:
parts-manual-ild01-1-206-rev-12-2006.pdf
Cała lista jest tutaj:
http://www.slope-mower.com/files/download/parts-books/I ciekawostka - zrobili toto Czesi
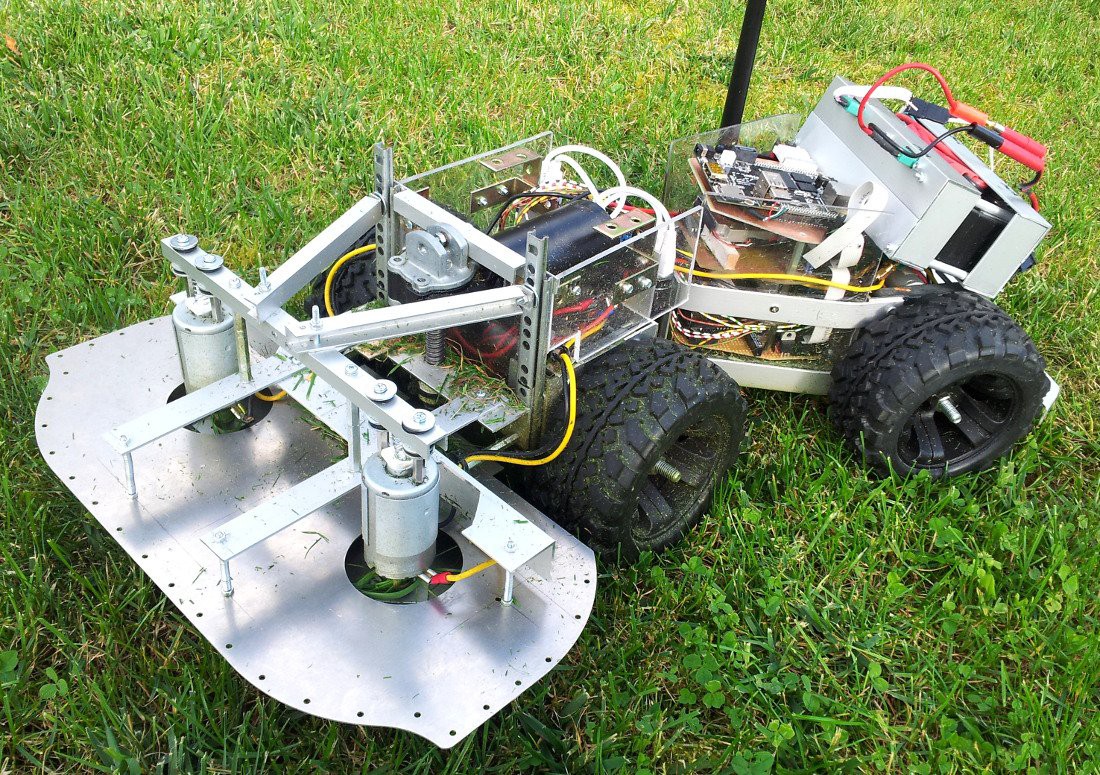
http://www.spider-cz.comCzy warto budować hybrydę gdzie silnik spalinowy będzie tylko używany do koszenia, a sterowanie i cała reszta będzie elektryczna? No można. Jest cała masa takich projektów. Dla przykładu:
Tu wystarczyłoby zdublować napędzany tył i mamy podobną funkcjonalność jak od tych Czechów. Oczywiście potrzebny byłby +1 silnik i trochę mechaniki żeby móc skręcać podobnie jak Spider. Ewentualnie +4 silniki wtedy mamy sterowanie każdym osobno - ale szkoda kasy i wagi.
Dodatkowo silnik spalinowy strasznie drga, co powoduje, że całość elektroniki musi być przed tym zabezpieczona.